Building your own DAPLink firmware¶
Introduction¶
Arm Mbed DAPLink is an open-source software project that enables programming and debugging application software running on Arm Cortex CPUs.
More features are planned and will show up gradually over time. The project is constantly under heavy development by Arm, its partners, numerous hardware vendors and the open-source community around the world. You are free to use and contribute. Enjoy!
For more detailed information, please refer to DAPLink GitHub repository.
This section describes how to set up a development environment and create a release build.
Note
The following instructions only work on Windows computer.
Set up prerequisites¶
Install the necessary tools listed below. Skip any step where a compatible tool already exists.
- Install Python 2, 2.7.11 or above. Add to PATH.
- Install Git. Add to PATH.
-
Install Keil MDK-ARM, preferably version 5.
Note
Set environment variable
UV4to the absolute path of the UV4 executable if you don't install to the default location. Note thatUV4is what's used for both MDK versions 4 and 5. -
Install
virtualenvin your global Python installation eg:pip install virtualenv.
Clone the sources¶
Get the sources and create a virtual environment:
$ git clone https://github.com/makerdiary/DAPLink
$ cd DAPLink
$ pip install virtualenv
$ virtualenv venv
Activate virtual environment¶
Activate the virtual environment and update requirements. This is necessary when you open a new shell.
$ venv/Scripts/activate (For Linux) $ venv/Scripts/activate.bat (For Windows) $ pip install -r requirements.txt
Generate MDK project files¶
Generate the Pitaya-Link project by running the following command:
progen generate -f projects.yaml -p lpc11u35_pitaya_link_if -t uvision
The project files are located in the projectfiles/uvision directory.
Note
This step MUST be done every time you pull new changes!
Build the project¶
Change to the projectfiles/uvision/lpc11u35_pitaya_link_if directory, and open the project using Keil MDK-ARM. Click the build icon to build the project.
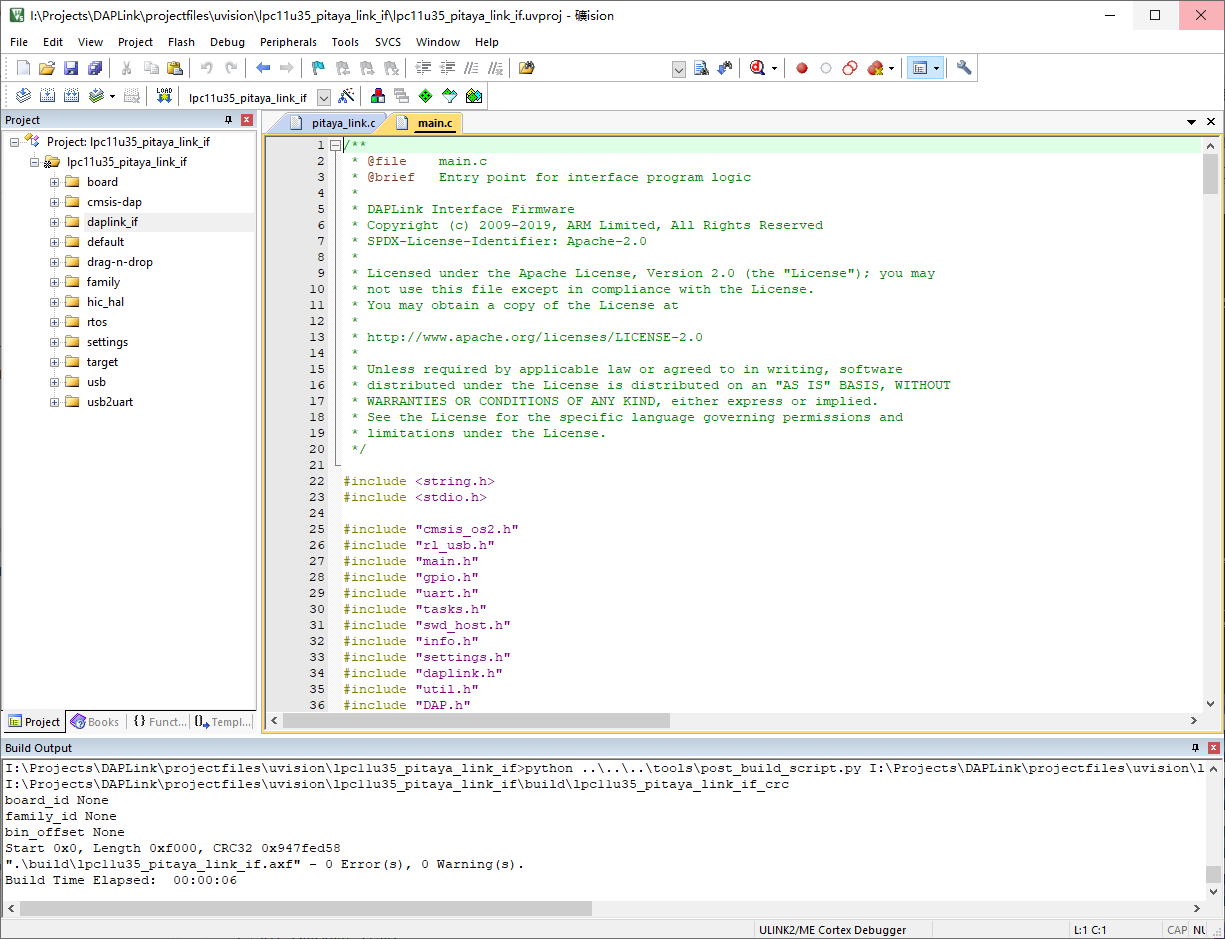
The new fimware is located in the lpc11u35_pitaya_link_if/build directory with the name lpc11u35_pitaya_link_if_crc.bin.
Follow the Upgrading Firmware section to upgrade.
Reference¶
Create an Issue¶
Interested in contributing to this project? Want to report a bug? Feel free to click here: