Building and Running the OpenThread examples¶
This section describes how to build the OpenThread library and example applications with the nRF5 SDK for Thread.
Before you start building, remember to set up the Thread development environment first. See Setting Up the Thread SDK for details.
Build the OpenThread libraries¶
Before building the OpenThread examples, you first need to build the OpenThread libraries.
-
Open terminal and change directory to:
cd ./grove-mesh-kit/deps/openthread -
To install the dependencies, run:
./bootstrap
-
Always clean the repo of previous builds first by running
make clean:make -f examples/Makefile-nrf52840 clean
-
For UART transport, run the following command. This allows you to communicate with the nRF52840 chip over UART interface.
make -f examples/Makefile-nrf52840 BORDER_AGENT=1 BORDER_ROUTER=1 COAP=1 COMMISSIONER=1 DNS_CLIENT=1 JOINER=1 LINK_RAW=1 MAC_FILTER=1 MTD_NETDIAG=1 SERVICE=1 UDP_FORWARD=1 ECDSA=1 SNTP_CLIENT=1 COAPS=1
-
Alternatively, if you want to use the USB transport, run the command below:
make -f examples/Makefile-nrf52840 BORDER_AGENT=1 BORDER_ROUTER=1 COAP=1 COMMISSIONER=1 DNS_CLIENT=1 JOINER=1 LINK_RAW=1 MAC_FILTER=1 MTD_NETDIAG=1 SERVICE=1 UDP_FORWARD=1 ECDSA=1 SNTP_CLIENT=1 COAPS=1 USB=1
Build the OpenThread CLI¶
Now it's ready to build the OpenThread CLI example. The example is located in grove-mesh-kit/examples/thread/cli.
Navigate to the directory with the OpenThread Full Thread Device (FTD) CLI Makefile:
cd ./grove-mesh-kit/examples/thread/cli/ftd/uart/armgcc
Run make to build the example:
make
Run the OpenThread CLI¶
To run the OpenThread CLI on your nRF52840-MDK, first connect it to your computer with a USB cable. When your board is detected, run make flash to flash the example:
make flash
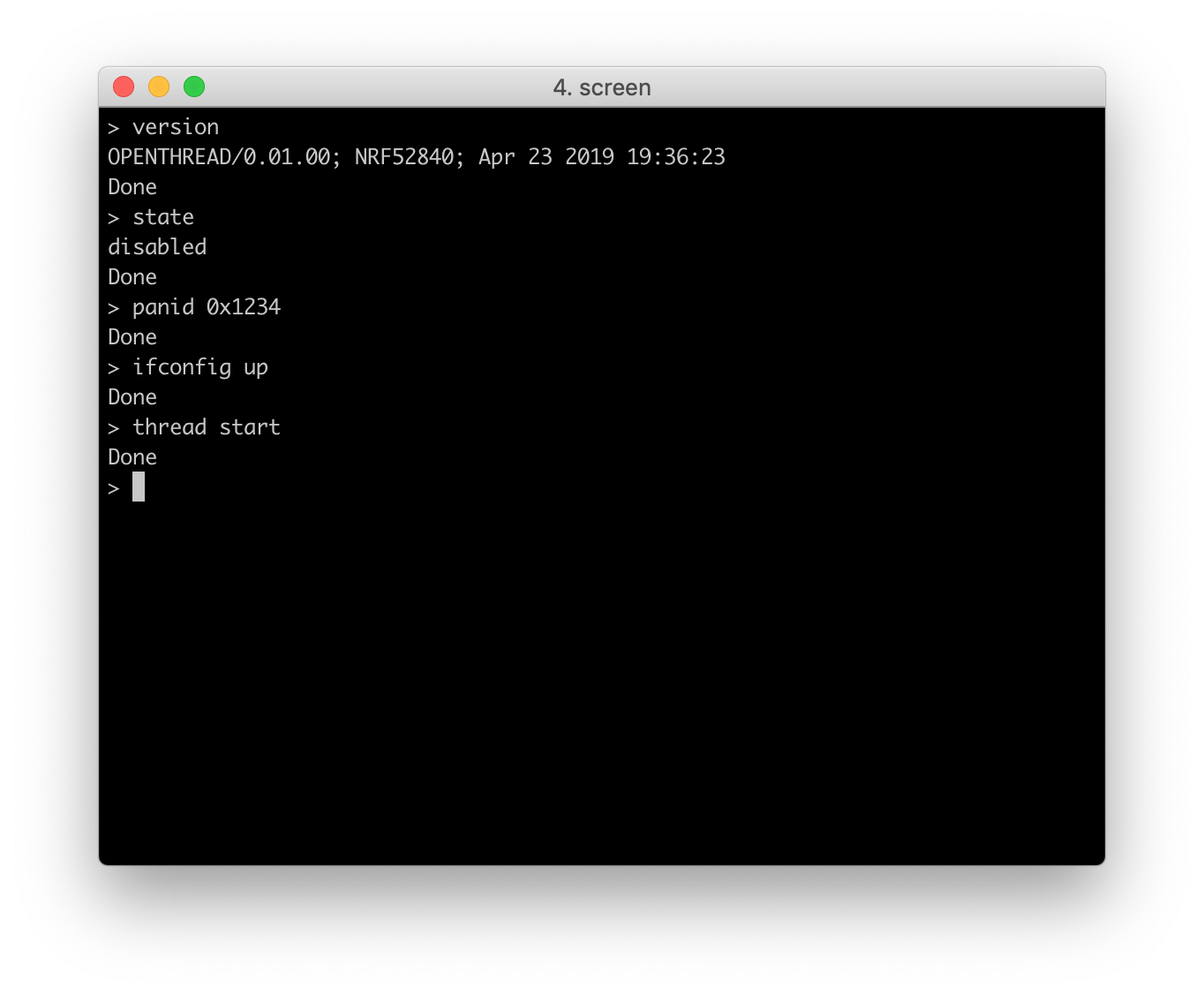
Run a terminal application like PuTTY or screen to configure the device:
screen /dev/cu.usbmodem141102 115200
Program the rest boards by repeating steps as described above. To test the example, follow the Running the OpenThread CLI section.
Next Steps¶
You can check out other Thread examples located in grove-mesh-kit/examples/thread. And further more, you can follow the tutorials to Build an OpenThread Border Router with Raspberry Pi, or Make an OpenThread Network Sniffer to sniff packets on a Thread network.
Create an Issue¶
Interested in contributing to this project? Want to report a bug? Feel free to click here: